We, Tsuchiya Planning Company, are planning to release the FileMaker-developed IPS application QuickIPS for Quuppa for indoor positioning systems by Quuppa in the Spring of 2024. This product receives the real-time location information of people and objects provided by the Quuppa Positioning Engine and is developed using FileMaker to display their locations on the maps of devices such as PC, iPhone and browser.
This article provides an explanation of this product.
What is Quuppa?
Quuppa is a system designed to provide indoor location information for people and objects. It is a product of the Finnish company Quuppa Oy. This product is referred to as a Real-Time Location System (RTLS) or Indoor Positioning System (IPS). In this system, tags (beacons) are attached to people and objects, and the system calculates their positions based on the signals emitted by these tags. It is somehow similar to GPS but specialized for indoor use in areas where satellite signals may not reach, and it offers higher positioning accuracy than GPS. Additionally, since the tags use Bluetooth Low Energy (BLE), they are energy-efficient and can operate for extended periods.
| Tag (Sensor) |

QT1-1 tag |
Attached to people or objects and emit signals, sometimes referred to as beacons. |
| Locator |

Q35 Locator |
Receives signals from the tags and sends them to the positioning engine. |
| Positioning Engine (Software) |

Quuppa Positioning Engine |
Receives tag information sent through locators, calculates the position information for each tag, and passes it to the application. Server required. |
QuickIPS for Quuppa
Quuppa's positioning engine provides tag location information in CSV and JSON formats through UDP Push and REST. User applications, such as displaying the positions of people and objects on a map, are typically developed by the implementing companies. However, developing these applications can be time-consuming and costly. Our QuickIPS for Quuppa is designed to reduce the effort and cost involved in this development work.
Features
1. Possible to quickly implement IPS applications
QuickIPS for Quuppa (hereinafter referred to as "QuickIPS") provides a 'Floormap' feature that displays the locations of tags on a map. Installation is easy, and with initial configuration such as importing floor images and aligning coordinates, you can quickly display the tag locations on the floor map.
QuickIPS allows IPS system implementation personnel to envision the applications that end-users will use in the early stages of the project.
2. Customization with FileMaker
QuickIPS is created with FileMaker, and a development version will also be provided. FileMaker is well-known as a low-code development tool, and developers can use FileMaker to customize QuickIPS, enabling them to develop high-quality IPS applications in a short amount of time.
3. Variable floormap development tools
QuickIPS offers five types of floormaps. When customizing using the development version, in addition to FileMaker's standard features, you can also utilize JavaScript library plotly (free) and the FileMaker plugin xmCHART (paid third-party).3-1. Scatter floormap
It is developed using FileMaker's scatter plot chart, and while its features are limited, development is straightforward.

3-2. Object floormap
It is developed using FileMaker's features, primarily merge fields and scripts, allowing for more advanced development compared to the Scatter Floor Map. Additionally, this floor map is unique compared to other floor maps, and customization during installation is required, necessitating the purchase of the development version.3-3. xmCHART floormap
It is developed using the FileMaker plugin xmCHART (paid), allowing the development of floor maps through the use of external functions provided by this product for FileMaker. Mastery of these external functions may require some learning, but they offer excellent flexibility and scalability for chart creation, and can be used for various chart types.
3-4. Plotly floormap
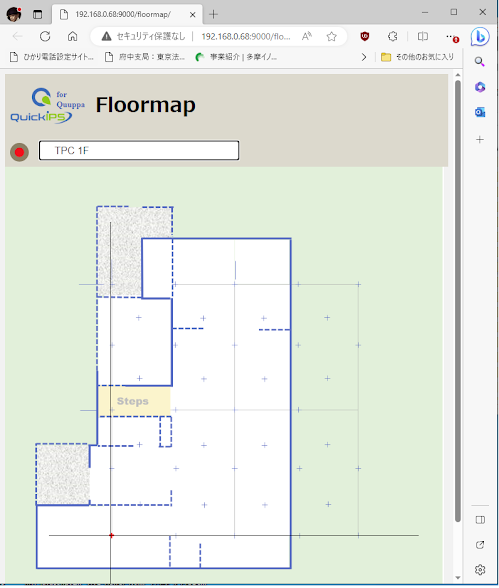
It is developed using JavaScript and the JavaScript library Plotly. Developers are required to have skills in Plotly, but it offers excellent flexibility and scalability for chart creation and can be used to create various types of charts.3-5. QuickIPS page (FileMaker client license independent)
Unlike the aforementioned floormaps, it does not require FileMaker client licenses and displays the floormap in a web browser. As it does not require the same licenses, it is cost-effective in environments with a large number of users.
However, for operation, one FileMaker Server license and one FileMaker Pro license for configuration management are required. Additionally, building a web server using Python, Plotly, Flask, and Waitress may also be necessary.
3-6. Development tools comparison
|
Floormaps |
Initial dev |
Diffi-culty |
Exten-sibility | Additional information |
|---|---|---|---|---|
| 1.Scatter | ― | low | low |
|
| 2.Object | Medium | Medium |
|
|
| 3.xmCHART | ― |
High |
High |
|
| 4.plotly | ― | High | High |
|
| 5.QuickIPS pages | ― | Very high | Very high |
|
3-7. "Picker" for selecting tags
 |
| Multiple tags selectable |
MANUAL: Clicking the update button displays the current tag location.
HISTORY: Displays past location saved in the database as specified by the user.
5. Error graph and error summary features

6. Available on various platforms
The various features of QuickIPS operate on various platforms.
| No | Features | FM Pro | FM Go | WebDirect | Browser | Note |
| 1 | Configuration | ✓ | ― | ― | ― | |
| 2 | Floormap adjustment | ✓ | ― | ― | ― | |
| 3 | AUTO mode | ✓ | ✓ | ✓ | ✓ | |
| 4 | HISTORY mode | ✓ | ✓ | ✓ | ― | |
| 5 | MANUAL mode | ✓ | ✓ | ✓ | ― | |
| 6 | Scatter floormap | ✓ | ✓ | ✓ | ― | |
| 7 | Object floormap | ✓ | ✓ | ✓ | ― | |
| 8 | xmCHART floormap | ✓ | ✓ | ✓ | ― | |
| 9 | Plotly floormap | ✓ | ✓ | ✓ | ― | |
| 10 | QuickIPS page | ✓ | ✓ | ✓ | ― | |
| 11 | Positioning error summary | ✓ | ✓ | ✓ | ― | |
| 12 | Positioning error graph | ✓ | ✓ | ✓ | ― | |
| 13 | Picker (tags selection) | ✓ | ✓ | ✓ | ― |
Note:
- 'Quuppa' is a trademark of Quuppa Oy.
- FileMaker Pro is required for initial setup and maintenance.
- WebDirect is a feature of FileMaker Server that allows you to use functions created in FileMaker on a web browser. To use WebDirect, in addition to FileMaker Server, a FileMaker client license is required for each user.
NuckyT






















{kind=link}